Overview
The goal of this project is to develop a control system for drones to paint drawings autonomously. By combining motion capture localization, cascaded PID control, and custom soft brushes, the system achieves the precision needed to create coordinated artwork with multiple drones.
Gripper Design
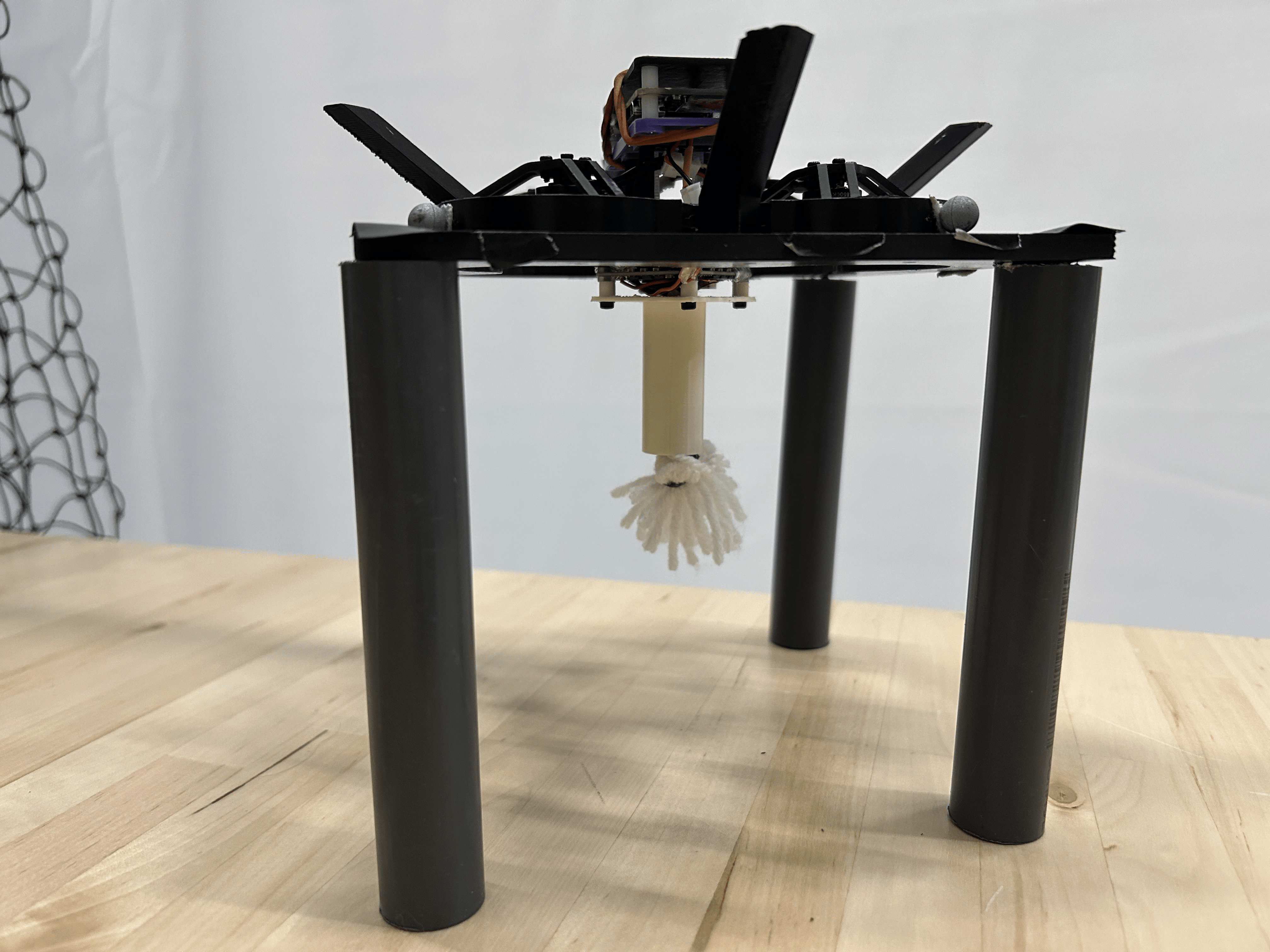
Traditional brushes were too stiff and caused the drone to flip over when pressed against the canvas. A custom soft brush made with yarn holds enough paint while remaining soft enough for the drone to make controlled contact. Oil paint mixed with linseed oil was chosen for its slow-drying properties and ability to stay on the brush during flight.
SwarmOS
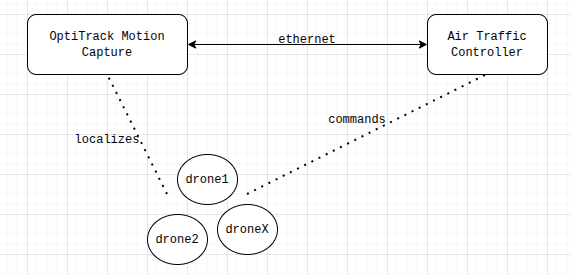
The air traffic controller (ATC) sends flight commands to the drones through wifi. The Optitrack system localizes the drones using reflective markers and communicates position data to the ATC through ethernet.
Cascaded PID Control
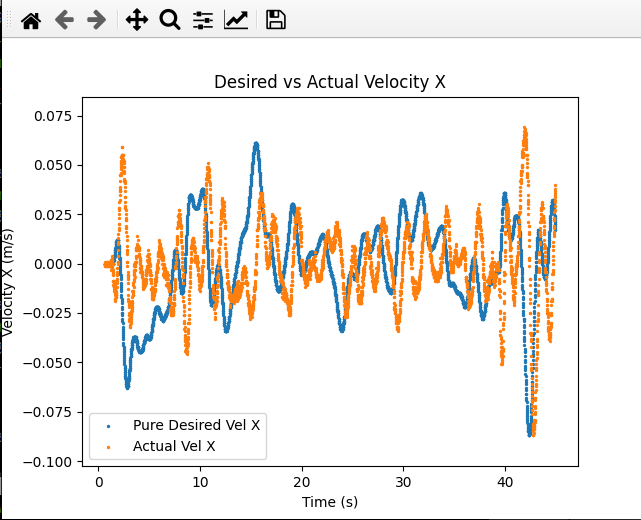
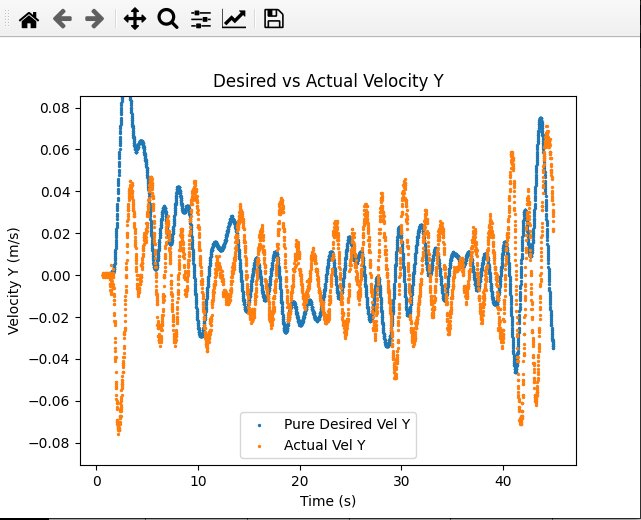
The initial single-loop position controller lacked the precision needed for accurate painting. A cascaded control system with separate position and velocity PID loops was implemented to improve performance.
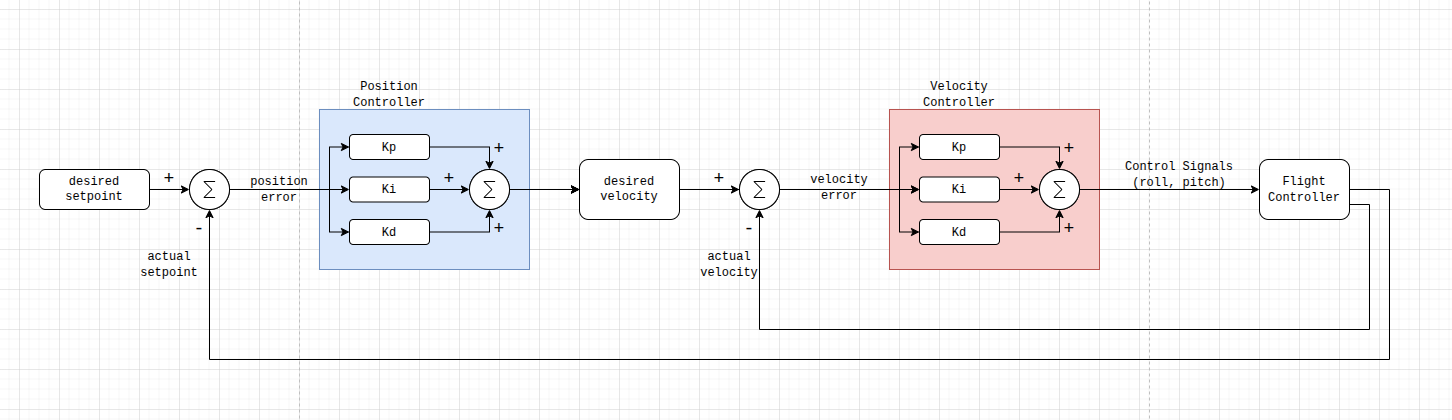
- Inner Loop (Velocity) reacts instantly to physical disturbances (like wind or motor changes) before they can affect the position.
- The Outer Loop (Position) then only needs to calculate the desired speed to reach the target. This architecture provides better damping and faster settling times than a single-loop controller.
Controller Comparison
Old controller hovering:
New controller hovering:
The old controller caused the drone to drift more while hovering while the new controller provides better stability.
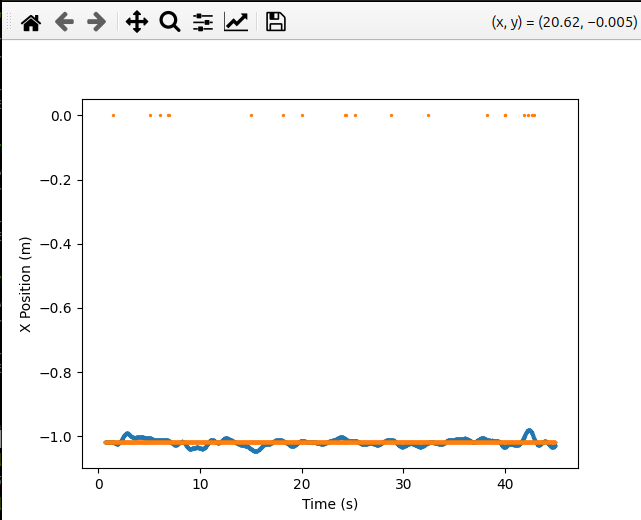
Old controller hovering performance:
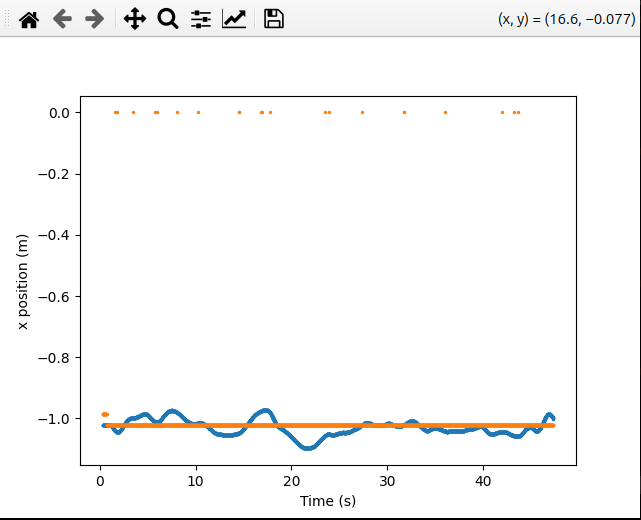
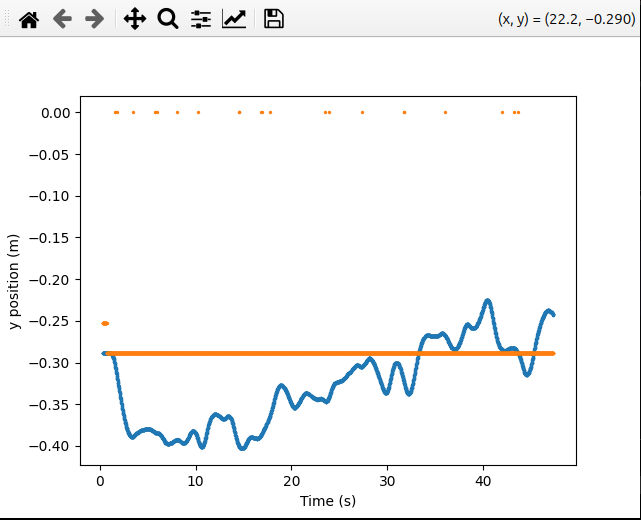
New controller hovering performance:

Painting
Acknowledgements
Special thanks to Drew Curtis, Prof. Matt Elwin, and Prof. Michael Rubenstein for their guidance and support throughout this project.